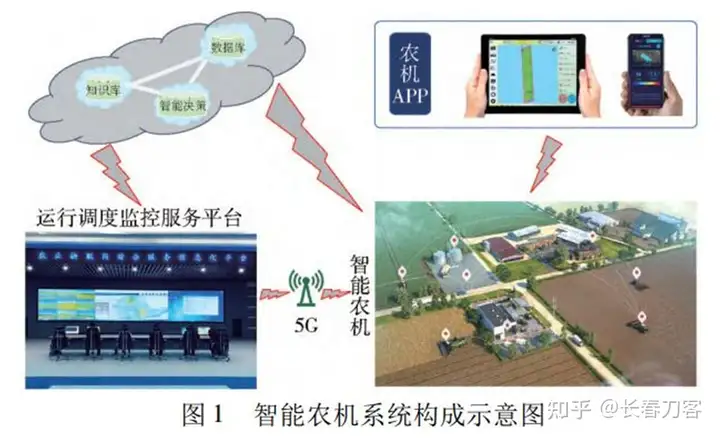
智能農(nóng)機(jī)裝備是集復(fù)雜農(nóng)業(yè)機(jī)械、智能感知/智能決策/智能控制、大數(shù)據(jù)/云平臺(tái)/物聯(lián)網(wǎng)等技術(shù)為一體的現(xiàn)代農(nóng)業(yè)裝備,可自主、高效、安全、可靠地完成農(nóng)業(yè)作業(yè)任務(wù)。
智能農(nóng)機(jī)系統(tǒng)以智能農(nóng)機(jī)裝備為核心,包括田間信息感知獲取、田間智能作業(yè)機(jī)械、田間互通互聯(lián)以及云-端互聯(lián)系統(tǒng)、云平臺(tái)決策管控中心。
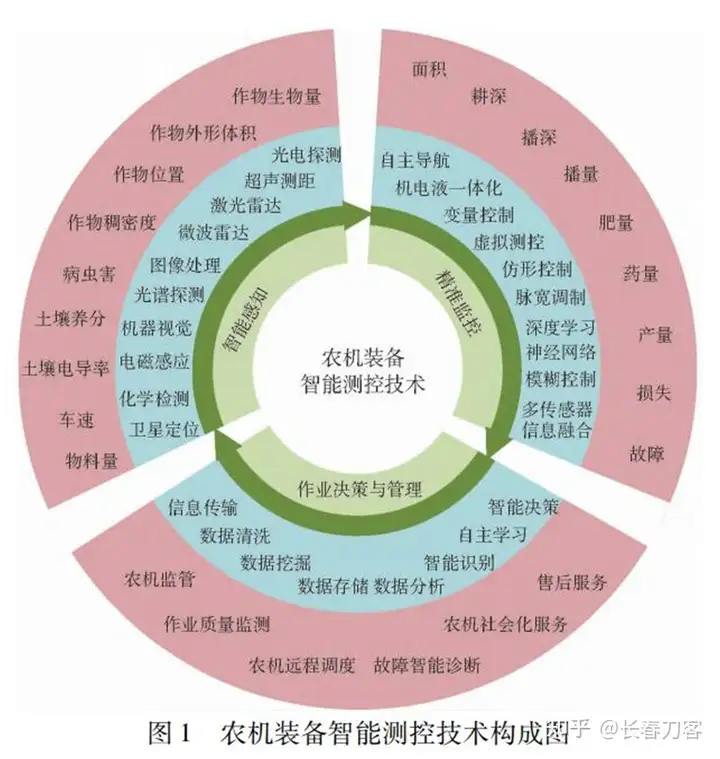
農(nóng)機(jī)裝備智能測(cè)控技術(shù)是智能農(nóng)機(jī)(無(wú)人農(nóng)場(chǎng))的核心。
一、智能感知技術(shù)
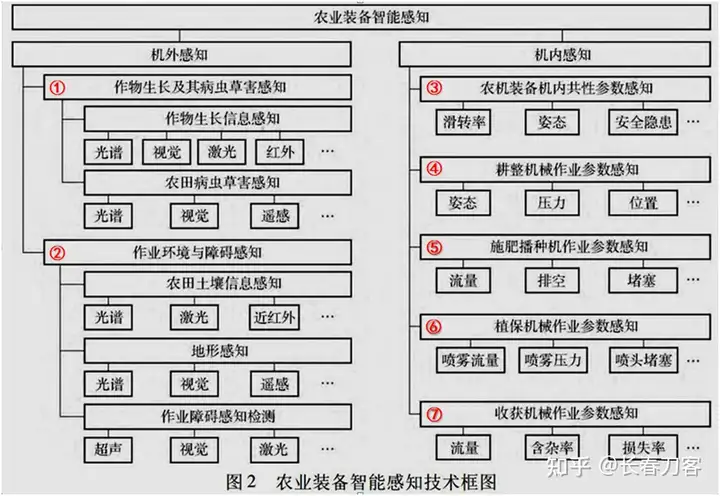
1-1 作物生長(zhǎng)與病蟲草害感知技術(shù)
(1)作物生長(zhǎng)信息感知技術(shù)
葉綠素、氮素含量是作物生長(zhǎng)的重要營(yíng)養(yǎng)指標(biāo),基于光譜特征分析法實(shí)時(shí)獲取作物葉綠素和氮素含量是變量施肥和精準(zhǔn)植保作業(yè)亟待解決的難題。
在葉綠素含量檢測(cè)研究方面:俄克拉荷馬州立大學(xué)使用多光譜成像傳感器檢測(cè)葉綠素含量和濃度,使用超聲波傳感器估算植被高度來(lái)提高葉綠素含量檢測(cè)精度;愛(ài)達(dá)荷大學(xué)使用平板彩色掃描儀檢測(cè)植物葉片葉綠素含量;德國(guó)慕尼黑工業(yè)大學(xué)將光譜技術(shù)和數(shù)字圖像處理技術(shù)結(jié)合用于葉綠素含量檢測(cè)。
l 李民贊團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))研究了基于近紅外光譜技術(shù)的葉綠素含量檢測(cè)方法。
l 朱艷團(tuán)隊(duì)(南京農(nóng)業(yè)大學(xué))基于高光譜遙感特征進(jìn)行小麥葉片含氮量檢測(cè)、小麥氮素積累動(dòng)態(tài)檢測(cè)等技術(shù)研究。
檢測(cè)傳感器及儀器產(chǎn)品開發(fā)方面,國(guó)內(nèi)外已有較為成熟的葉綠素含量及氮含量檢測(cè)儀器,技術(shù)已相對(duì)成熟。
便攜式手持產(chǎn)品可實(shí)現(xiàn)參數(shù)的離線檢測(cè),離線手持式測(cè)量?jī)x器已實(shí)現(xiàn)產(chǎn)品化。
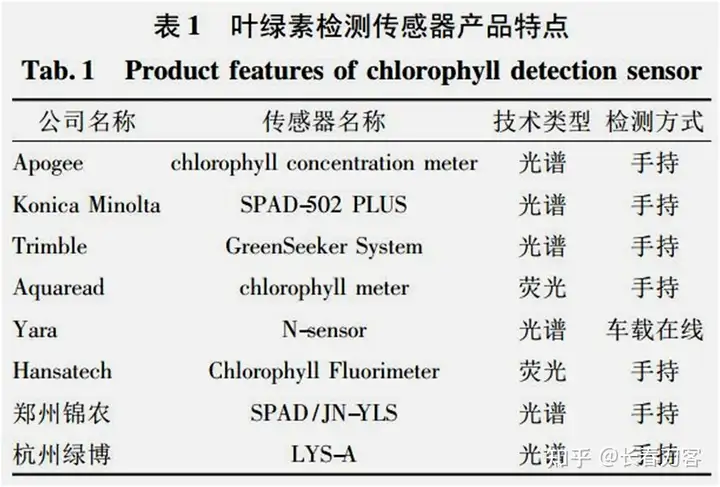

Yara公司(雅苒國(guó)際)的N-sensor傳感器可直接安裝在車載機(jī)具上進(jìn)行作物葉綠素含量以及氮素含量的在線檢測(cè),精度還有待進(jìn)一步提高。
車載葉綠素和氮素含量高精度實(shí)時(shí)在線快速檢測(cè)是變量施肥和精準(zhǔn)植保作業(yè)的關(guān)鍵,是亟待解決的難題。
(2)農(nóng)田病蟲草害信息感知技術(shù)
目前病蟲害的檢測(cè)方法主要有熒光光譜法、可見/近紅外光譜法、高光譜成像和數(shù)字圖像處理法等。
國(guó)外學(xué)者的研究工作較早。如美國(guó)愛(ài)達(dá)荷州立大學(xué),基于光譜特征,使用支持向量機(jī)(SVM,機(jī)器學(xué)習(xí)算法)來(lái)檢測(cè)感染病毒的馬鈴薯植株; 德國(guó)波恩大學(xué),基于熒光光譜特征,使用支持向量機(jī)來(lái)檢測(cè)小麥葉銹病;比利時(shí)魯汶大學(xué),基于高光譜反射信息,使用熒光成像技術(shù)來(lái)檢測(cè)冬小麥黃銹病。
l 何勇團(tuán)隊(duì)(浙江大學(xué))利用可見光和近紅外光等光譜信息對(duì)茄子葉片灰霉病、大豆豆莢炭疽病進(jìn)行檢測(cè)。
l 王儒敬團(tuán)隊(duì)(中國(guó)科學(xué)院)研究了基于深度學(xué)習(xí)的病蟲害智能化識(shí)別系統(tǒng),使用多分類器融合的方法對(duì)玉米葉部病害進(jìn)行識(shí)別。
目前雜草的檢測(cè)識(shí)別定位主要有視覺(jué)法和光譜法。
澳大利亞昆士蘭科技大學(xué)、日本名古屋大學(xué)、丹麥奧爾堡大學(xué)、法國(guó)勃艮第大學(xué)、比利時(shí)讓布盧大學(xué)等使用單目相機(jī)、立體視覺(jué)傳感器等進(jìn)行雜草檢測(cè)。
l 李偉團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))研究了基于視覺(jué)形態(tài)特征的雜草識(shí)別方法,將其應(yīng)用到移栽類蔬菜用苗間鋤草機(jī)器人上。
l 何東健(西北農(nóng)林科技大學(xué))等和李先鋒(江蘇大學(xué))等分別將支持向量機(jī)和DS證據(jù)理論(人工智能)用于多特征融合的雜草識(shí)別方法。
國(guó)內(nèi)外一些農(nóng)機(jī)企業(yè)也推出了農(nóng)田雜草識(shí)別系統(tǒng),科樂(lè)收(CLAAS)、藍(lán)河科技(Blue River Technology)分別使用了基于視覺(jué)的田間雜草感知系統(tǒng)(圖4a)。碳蜂公司(Carbon Bee)推出了一種車載的高光譜傳感器AQiT-Sensor,可以識(shí)別出作物中間生長(zhǎng)的雜草(圖4b)。

目前農(nóng)田雜草的感知技術(shù)主要基于視覺(jué)特征,對(duì)于不同的雜草需要不同的算法,用于學(xué)習(xí)訓(xùn)練的數(shù)據(jù)庫(kù)比較單一和獨(dú)立。未來(lái)可以將雜草的特征進(jìn)行整合建立一個(gè)統(tǒng)一的數(shù)據(jù)庫(kù),使用機(jī)器學(xué)習(xí)的方式將各種雜草最主要的特征進(jìn)行提取,減少終端的運(yùn)算量,提高雜草感知的準(zhǔn)確性和實(shí)時(shí)性。
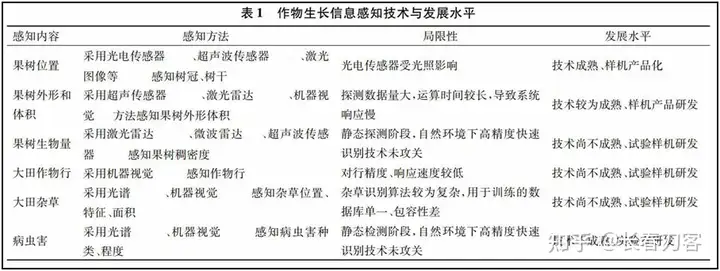
目前研究現(xiàn)狀:
作物位置(成熟)、外形體積(成熟) ;
生物量(不成熟)、病蟲草害信息(不成熟)。
1-2 作業(yè)環(huán)境與障礙感知技術(shù)
(1)農(nóng)田土壤信息感知技術(shù)
土壤養(yǎng)分信息獲取:
①測(cè)土配方:目前國(guó)際上應(yīng)用最廣。但是測(cè)土配方采樣?xùn)鸥駞^(qū)域較大,細(xì)化柵格進(jìn)行土壤養(yǎng)分測(cè)定耗時(shí)耗力,需要長(zhǎng)期積累。
②遙感探測(cè)技術(shù):通過(guò)對(duì)土壤進(jìn)行探測(cè),經(jīng)反演模型構(gòu)建,分析有機(jī)質(zhì)等土壤養(yǎng)分信息作為施肥處方變量依據(jù),是一種大范圍處方信息快速獲取手段。但是存在動(dòng)態(tài)數(shù)據(jù)監(jiān)測(cè)困難的問(wèn)題。
③土壤電導(dǎo)率:能夠反映土壤養(yǎng)分差異,是施肥變量在線獲取的重要手段,主要有電磁感應(yīng)法、遙感法、化學(xué)檢測(cè)法、“電流-電壓”四端法,研究應(yīng)用最多的是四端法,其檢測(cè)裝備可快速檢測(cè)電導(dǎo)率并且受環(huán)境干擾較小。
車載土壤信息獲取包括土壤養(yǎng)分、水分、酸堿度、壓實(shí)度等信息。
車載土壤養(yǎng)分精確測(cè)量目前還沒(méi)有成熟的手段,但國(guó)內(nèi)外學(xué)者都對(duì)此進(jìn)行了大量深入研究。
國(guó)外:美國(guó)喬治亞大學(xué)使用射頻識(shí)別技術(shù)對(duì)土壤的溫度信息進(jìn)行快速無(wú)線實(shí)時(shí)監(jiān)測(cè); 意大利卡西諾大學(xué)使用主動(dòng)紅外熱成像法實(shí)現(xiàn)了實(shí)驗(yàn)室和現(xiàn)場(chǎng)的土壤含水量快速檢測(cè); 比利時(shí)列日大學(xué)使用近紅外反射光譜法檢測(cè)土壤有機(jī)質(zhì)含量。
l 何勇團(tuán)隊(duì)(浙江大學(xué))利用土壤的光譜特征來(lái)檢測(cè)土壤的有機(jī)質(zhì)含量、含水率、氮磷含量、pH 值等信息;
l 李民贊團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))基于鹵鎢燈光源和多路光纖法設(shè)計(jì)了土壤全氮含量檢測(cè)儀,基于近紅外光譜信息對(duì)土壤參數(shù)進(jìn)行實(shí)時(shí)分析;
l 王儒敬團(tuán)隊(duì)(中國(guó)科學(xué)院)設(shè)計(jì)了土壤鉀離子非接觸電導(dǎo)檢測(cè)裝置,基于光譜、卷積神經(jīng)網(wǎng)絡(luò)等方法對(duì)土壤有機(jī)質(zhì)含量進(jìn)行預(yù)測(cè);
l 張小超團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院)研究了基于激光誘導(dǎo)擊穿光譜的土壤鉀素檢測(cè)方法,應(yīng)用傅里葉變換近紅外光譜技術(shù)分析了土樣的全氮、全鉀、有機(jī)質(zhì)養(yǎng)分含量和pH 值;
l 孫宇瑞團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))開發(fā)了土壤水分剖面實(shí)時(shí)測(cè)量傳感器、農(nóng)田土壤含水率與堅(jiān)實(shí)度信息快速采集系統(tǒng),運(yùn)用近紅外光譜分析方法對(duì)土壤質(zhì)地進(jìn)行分類。

奧地利 POTTINGER公司的車載綜合土壤傳感器TSM,可以實(shí)時(shí)地掃描土壤表層和深層土質(zhì)結(jié)構(gòu),得到不同區(qū)塊的壓實(shí)度、含水率、電導(dǎo)率和土壤類型等信息。

美國(guó)精密種植公司(Precision Planting) Smart Firmer傳感器和Delta Force壓力傳感器能夠感知土壤的有機(jī)質(zhì)含量,收集溫度和濕度信息,采集土壤的硬度信息。
美國(guó)Veris公司的iScan車載傳感器可以實(shí)時(shí)檢測(cè)土壤的質(zhì)地、含水率、溫度、土壤陽(yáng)離子交換容量、有機(jī)質(zhì)含量等信息。
在土壤電導(dǎo)率方面:
l 李民贊團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))研制出便攜式土壤電導(dǎo)率檢測(cè)裝置。
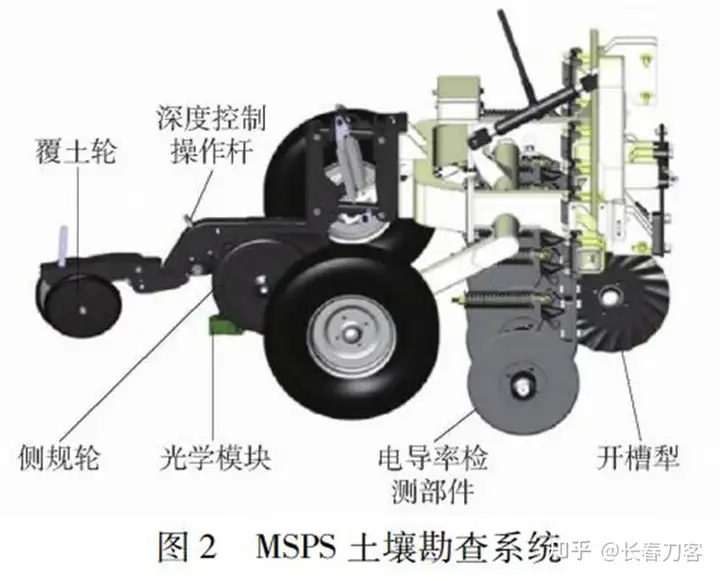
美國(guó)Veris公司研制的車載式MSPS土壤OM-EC-pH勘查測(cè)繪系統(tǒng)可以快速、高密度、原位測(cè)繪區(qū)域土壤電導(dǎo)等參數(shù)。
土壤電導(dǎo)率在線監(jiān)測(cè)系統(tǒng)的精度和可靠性是困擾土壤電導(dǎo)率國(guó)產(chǎn)化產(chǎn)品應(yīng)用的難題,研究土壤電導(dǎo)率與施肥處方?jīng)Q策模型將是下一步工作重點(diǎn)。
土壤養(yǎng)分車載精確測(cè)量是未來(lái)努力的方向,車載含水率、酸堿度、壓實(shí)度、有機(jī)質(zhì)含量等參數(shù)測(cè)量技術(shù)相對(duì)成熟,但高可靠性、高精度、多參數(shù)組合量傳感器是未來(lái)的發(fā)展方向,在土壤中預(yù)埋大量物聯(lián)網(wǎng)傳感器的智慧農(nóng)田系統(tǒng)是未來(lái)智慧農(nóng)業(yè)的發(fā)展趨勢(shì)。
(2)作業(yè)障礙信息感知技術(shù)
目前障礙物檢測(cè)手段主要有超聲雷達(dá)、激光雷達(dá)、紅外傳感、視覺(jué)傳感器以及多傳感融合等。
l 美國(guó)肯塔基大學(xué)使用超聲波傳感器檢測(cè)農(nóng)業(yè)環(huán)境中的障礙物。
l 韓國(guó)外國(guó)語(yǔ)大學(xué)、西班牙阿卡拉德赫拿勒斯大學(xué)使用多個(gè)超聲波傳感器組成陣列來(lái)檢測(cè)障礙物,該方法可以有效地提高穩(wěn)定性。
l 德國(guó)漢諾威大學(xué)使用三維激光雷達(dá)檢測(cè)障礙物,受天氣、光照等環(huán)境因素的影響較小。
l 美國(guó)斯坦福大學(xué)使用單目視覺(jué)傳感器檢測(cè)障礙物,配合強(qiáng)化學(xué)習(xí)算法提高檢測(cè)穩(wěn)定性(圖 6)。
l 德國(guó)凱澤斯勞滕大學(xué)使用雙目立體視覺(jué)生成點(diǎn)云信息,識(shí)別障礙物比單目視覺(jué)更加準(zhǔn)確。
l 劉成良團(tuán)隊(duì)(上海交通大學(xué))研究了基于支持向量機(jī)的視覺(jué)水田田埂邊界檢測(cè)方法。
l 周俊團(tuán)隊(duì)(南京農(nóng)業(yè)大學(xué))基于機(jī)器視覺(jué)技術(shù)檢測(cè)作業(yè)環(huán)境中的運(yùn)動(dòng)障礙,采用幀差法消除機(jī)器人自身運(yùn)動(dòng)的影響。
l 何東健團(tuán)隊(duì)(西北農(nóng)林科技大學(xué))基于機(jī)器視覺(jué)技術(shù),使用貝葉斯決策圖像分割法進(jìn)行障礙物檢測(cè)。
l 奧地博田公司的車載Sensosafe傳感器通過(guò)光學(xué)紅外傳感器檢測(cè)在收割時(shí)隱藏在草叢中的野生動(dòng)物。
農(nóng)業(yè)裝備作業(yè)環(huán)境中的障礙物感知技術(shù)中,紅外技術(shù)是檢測(cè)人和動(dòng)物的有效方法,超聲與激光雷達(dá)測(cè)量范圍大,對(duì)距離、速度檢測(cè)精度高,三維雷達(dá)測(cè)量精度高,但成本也高,基于視覺(jué)、二維雷達(dá)組合的障礙物檢測(cè)是較理想的方案,多傳感融合是農(nóng)田障礙感知的研究重點(diǎn)。
1-3 農(nóng)業(yè)裝備共性參數(shù)感知技術(shù)
農(nóng)業(yè)裝備機(jī)內(nèi)共性參數(shù)包括發(fā)動(dòng)機(jī)信息、動(dòng)力輸出信息、扭矩信息、滑轉(zhuǎn)率、姿態(tài)信息、安全隱患信息等。其中發(fā)動(dòng)機(jī)信息、動(dòng)力輸出信息等可通過(guò)CAN總線按照ISO 11783協(xié)議讀出,姿態(tài)信息一般可采用北斗模塊和陀螺儀獲得,而扭矩信息、滑轉(zhuǎn)率是農(nóng)業(yè)裝備共性參數(shù)檢測(cè)的難點(diǎn)。
l 伊朗學(xué)者基于徑向基函數(shù) (RBF) 神經(jīng)網(wǎng)絡(luò)和自適應(yīng)神經(jīng)網(wǎng)絡(luò)模糊推理系統(tǒng)(ANFIS) ,使用低成本傳感器對(duì)拖拉機(jī)發(fā)動(dòng)機(jī)的扭矩進(jìn)行了估測(cè)。
l 王書茂團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))使用多模多頻衛(wèi)星定位與慣導(dǎo)測(cè)速技術(shù),采用扭振補(bǔ)償?shù)男D(zhuǎn)編碼測(cè)速方法,實(shí)現(xiàn)了低速扭振動(dòng)力機(jī)械的驅(qū)動(dòng)輪邊速的高精度測(cè)量。
未來(lái)農(nóng)業(yè)裝備機(jī)內(nèi)共性參數(shù)感知的研究重點(diǎn)是扭矩信息和車輪滑轉(zhuǎn)率精確測(cè)量。
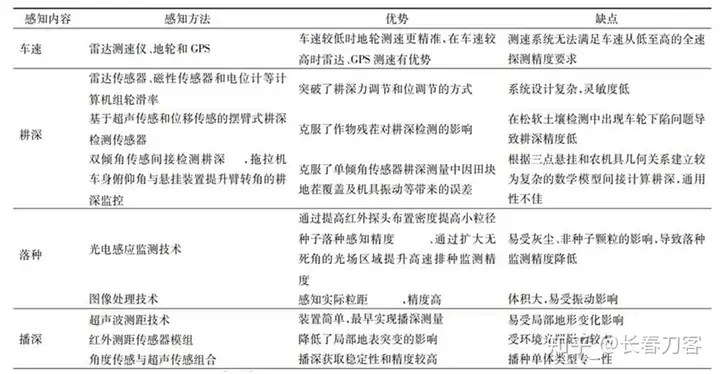
1-4 耕整機(jī)械作業(yè)參數(shù)感知技術(shù)
耕整機(jī)械的作業(yè)參數(shù)有姿態(tài)、壓力、位置、深度等。
l 孟志軍團(tuán)隊(duì)(北京農(nóng)業(yè)智能裝備技術(shù)研究中心)提出一種基于深松機(jī)組姿態(tài)估測(cè)的耕深檢測(cè)方法。
l 朱忠祥團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)大學(xué))提出一種基于傾角傳感器的自動(dòng)測(cè)量農(nóng)機(jī)具耕深的方法。
l 苑嚴(yán)偉團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院)提出一種基于超聲波測(cè)距傳感器的懸掛式深松機(jī)耕深在線檢測(cè)方法。
l 博世力士樂(lè)公司(中德)推出用于耕整機(jī)械的液壓控制解決方案,方案使用多種傳感器實(shí)現(xiàn)了耕整機(jī)具姿態(tài)感知、耕整作業(yè)阻力感知、耕整深度感知。
未來(lái)耕整機(jī)械的作業(yè)參數(shù)感知可以結(jié)合土壤信息感知技術(shù),在耕整階段全方位、多參數(shù)地感知土壤信息,建立土壤信息圖,實(shí)現(xiàn)“一次感知,全過(guò)程使用”。
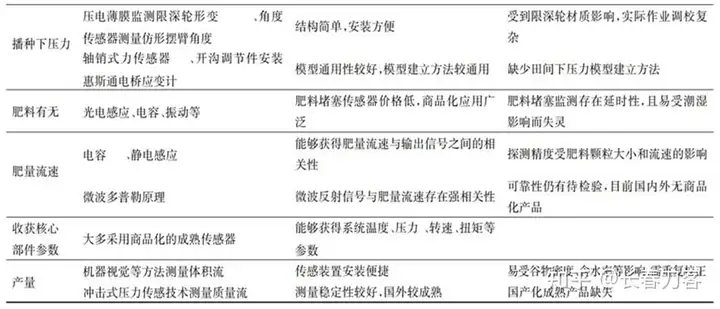
1-5 施肥播種機(jī)械作業(yè)參數(shù)感知技術(shù)
施肥播種機(jī)械的作業(yè)參數(shù)有種肥流速流量、播施深度等。
l 苑嚴(yán)偉團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院)設(shè)計(jì)了一種差分結(jié)構(gòu)的電容傳感器,在排料管道外壁構(gòu)建陣列式電容傳感器來(lái)提高檢測(cè)精度。
l 劉成良團(tuán)隊(duì)(上海交通大學(xué))基于電容法設(shè)計(jì)了一套用于小麥播種量檢測(cè)的系統(tǒng),建立了種子數(shù)量與電容變化量之間的線性關(guān)系。
l 余洪鋒團(tuán)隊(duì)(南京農(nóng)業(yè)大學(xué))設(shè)計(jì)了一種基于皮帶秤的施肥機(jī)施肥性能檢測(cè)裝置,裝置可以檢測(cè)排肥口的實(shí)時(shí)流量。
l 美國(guó)精密種植公司的SpeedTube是高速種植系統(tǒng)的一個(gè)組件,可以在高速播種的情況下精確測(cè)量播種施肥的速率。
目前施肥播種精量控制技術(shù)比較成熟,但在肥種流量檢測(cè)方面,雖然有光電、電容等不同方法,但其精度不高、可靠性還有待進(jìn)一步提高,應(yīng)側(cè)重于檢測(cè)數(shù)據(jù)的智能處理方法以及創(chuàng)新感知原理新型傳感器設(shè)計(jì)的研究。
1-6 植保機(jī)械作業(yè)參數(shù)感知技術(shù)
植保機(jī)械作業(yè)狀態(tài)參數(shù)包括 噴霧壓力、噴霧流量、噴桿姿態(tài)等。
l 李樹江團(tuán)隊(duì)(沈陽(yáng)工業(yè)大學(xué))通過(guò)多傳感信息采集,建立基于總線的作業(yè)速度、噴霧流量、噴霧壓力、噴桿作業(yè)狀態(tài)、噴頭堵塞、噴桿高度探測(cè)、藥液體積、氣象環(huán)境等參數(shù)的在線監(jiān)測(cè)系統(tǒng),并實(shí)現(xiàn)噴頭堵塞及低流量自動(dòng)報(bào)警、噴桿高度自動(dòng)仿形,解決了傳統(tǒng)植保機(jī)械容易出現(xiàn)的農(nóng)藥漏噴、不均勻和飄移等問(wèn)題。
l 美國(guó)精密種植公司開發(fā)了用于液體測(cè)量的傳感器,該傳感器可以實(shí)時(shí)測(cè)量包括液體農(nóng)藥和液體肥料在內(nèi)的液體流量。
目前對(duì)于植保機(jī)械的作業(yè)參數(shù)感知研究較少,未來(lái)應(yīng)研究液體肥料和農(nóng)藥的感知機(jī)理,解決傳感器的抗腐蝕性和精度保持性問(wèn)題。
1-7 收獲機(jī)械作業(yè)參數(shù)感知技術(shù)
稻麥、玉米等聯(lián)合收獲機(jī)械的作業(yè)參數(shù)有含水率、流量、損失率、含雜率等。
l 巴西圣保羅大學(xué)使用 6 個(gè)雙板差分沖擊式傳感器形成陣列來(lái)測(cè)量谷物產(chǎn)量,有效地減小了振動(dòng)引起的噪聲干擾。
l 印度旁遮普農(nóng)業(yè)大學(xué)基于稱量傳感器開發(fā)了安裝在儲(chǔ)罐底部的收獲機(jī)械產(chǎn)量傳感器,結(jié)合GPS系統(tǒng)開發(fā)了產(chǎn)量制圖系統(tǒng)。
l 丹麥電氣工程技術(shù)大學(xué)使用谷物流量模型和谷物吞吐量傳感器,對(duì)谷物流量進(jìn)行預(yù)測(cè)。
l 印度農(nóng)業(yè)工程學(xué)院使用人工神經(jīng)網(wǎng)絡(luò)技術(shù)評(píng)估田間條件下的谷物收獲損失。
l 加拿大阿爾伯塔大學(xué)使用9個(gè)聲學(xué)谷物撞擊傳感器布置在收割機(jī)分離格柵下方,通過(guò)對(duì)聲學(xué)撞擊信號(hào)的分析檢測(cè)谷物損失量。
l 比利時(shí)魯汶大學(xué)基于多光譜視覺(jué)傳感器和遺傳算法檢測(cè)谷物流中的谷殼、稻草等雜質(zhì),得到谷物清潔度數(shù)據(jù)。
l 羅錫文團(tuán)隊(duì)(華南農(nóng)業(yè)大學(xué))設(shè)計(jì)了一種雙板沖量式谷物流量傳感器及其差分消振電路,以消除車身振動(dòng)對(duì)測(cè)產(chǎn)精度的影響。
l 劉成良團(tuán)隊(duì)(上海交通大學(xué))設(shè)計(jì)了沖量式谷物聯(lián)合收獲機(jī)智能測(cè)產(chǎn)系統(tǒng)和基于計(jì)算機(jī)視覺(jué)的谷物測(cè)產(chǎn)系統(tǒng)。
l 張小超團(tuán)隊(duì)(中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院)研究了基于稱重法的聯(lián)合收獲機(jī)測(cè)產(chǎn)方法,設(shè)計(jì)了用于聯(lián)合收獲機(jī)谷物損失測(cè)量的聚偏氟乙烯陣列傳感器。
l 劉成良團(tuán)隊(duì)(上海交通大學(xué))研究了基于光電原理的棉花流量產(chǎn)量測(cè)量裝置,引入網(wǎng)絡(luò)神經(jīng)元進(jìn)行數(shù)據(jù)的分析。
l 鄭傳濤團(tuán)隊(duì)(吉林大學(xué))提出采用可調(diào)諧二極管激光吸收光譜技術(shù),探測(cè)痕量CO,研制抗干擾新型紅外CO傳感器。
目前收獲機(jī)械的作業(yè)參數(shù)傳感原理已基本成熟,國(guó)外科樂(lè)收等機(jī)型也安裝有成熟的水分、流量等傳感器。
國(guó)內(nèi)缺乏成熟的產(chǎn)品,主要在于檢測(cè)精度與可靠性不高,雖然多年來(lái)國(guó)內(nèi)學(xué)者一直進(jìn)行此方面的研究,但在精度、可靠性、算法模型等方面與實(shí)際應(yīng)用還有差距。